| 机型 | CR-4iA | CR-7iA | CR-7iA/L | CR-14iA/L | |
| 控制轴数 | 6轴(J1, J2, J3, J4, J5, J6 | ||||
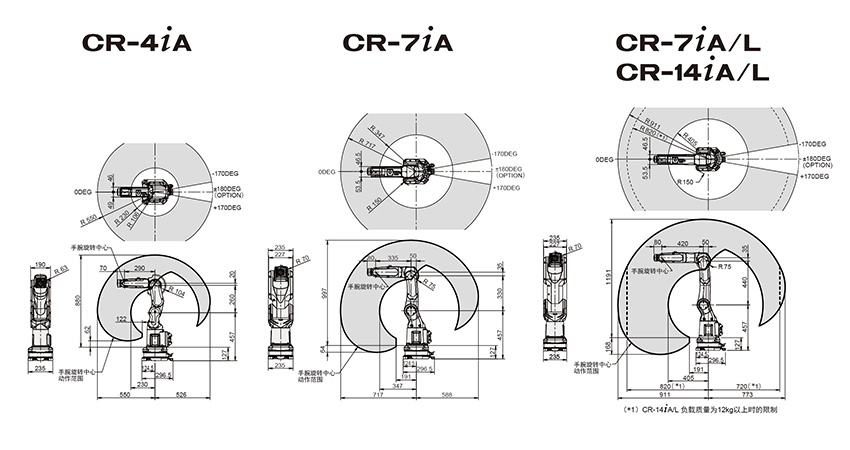
| 可达半径 | 550 mm | 717 mm | 911 mm |
911 mm ( 负载未满12kg时) 820 mm (负载12kg以上时) |
|
| 安装方式(注释1) | 地面安装、顶吊安装、倾斜角安装 | ||||
| 动作范围 | J1轴 | 340° 5.93rad | 340° 5.93rad | 340° 5.93rad | 340° 5.93rad |
| J2轴 | 150° 2.61rad | 166° 2.89rad | 166° 2.89rad | 166° 2.89rad | |
| J3轴 | 354° 6.17rad | 373° 6.51rad | 383° 6.68rad | 383° 6.68rad | |
| J4轴 | 380° 6.63rad | 380° 6.63rad | 380° 6.63rad | 380° 6.63rad | |
| J5轴 | 200° 3.49rad | 240° 4.18rad | 240° 4.18rad | 240° 4.18rad | |
| J6轴 | 720° 12.57rad | 720° 12.57rad | 720° 12.57rad | 720° 12.57rad | |
| 手腕部可搬运质量(注释2) | 4kg | 7kg | 7kg | 14kg | |
| 最高速度(注释3,注释4) | 1000 mm/s | 1000 mm/s | 1000 mm/s | 500 mm/s | |
| 手腕允许负载转矩 | J4轴 | 8.86 N·m | 16.6 N·m | 16.6 N·m | 31.0 N·m |
| J5轴 | 8.86 N·m | 16.6 N·m | 16.6 N·m | 31.0 N·m | |
| J6轴 | 4.90 N·m | 9.4 N·m | 9.4 N·m | 13.4 N·m | |
| 手腕允许负载转动惯量 | J4轴 | 0.20 kg·m² | 0.47 kg·m² | 0.47 kg·m² | 0.66 kg·m² |
| J5轴 | 0.20 kg·m² | 0.47 kg·m² | 0.47 kg·m² | 0.66 kg·m² | |
| J6轴 | 0.067 kg·m² | 0.15 kg·m² | 0.15 kg·m² | 0.30 kg·m² | |
| 重复定位精度(注释5) | ± 0.01 mm | ± 0.01 mm | ± 0.01 mm | ± 0.01 mm | |
| 机器人质量(注释6) | 48 kg | 53 kg | 55 kg | 55 kg | |
| 安装条件 | 环境温度 | 0~45℃ | |||
| 环境湿度 |
通常在75 % RH以下
(无结露现象) 短期在95% RH以下(1个月之内) |
||||
| 振动加速度 | 4.9 m/s² (0.5G)以下 | ||||
注释1)壁挂安装时,根据负载质量,附有动作范围的限制。
注释2)包含外围设备电缆摆动负载以及附加仪器的总质量,请不要超过此值。
注释3)短距离移动时,有可能达不到最高速度。
注释4)需要根据系统的风险评估,决定动作速度。
注释5)遵从ISO 9283《工业机器人性能规范及其试验方法》的测量结果。
注释6)不包含控制装置质量。
| 动作范围 |
|
推荐产品

关注我们
0757-23339411
www.dazhi-robot.com
Copyright © 2020 广州达志自动化设备有限公司 All Rights Reserved | 本站部分图片来源于互联网,如果涉及版权问题,请按网站上公布的联系方式告知删除
技术支持:佛山网站建设
 QQ咨询
QQ咨询 微信咨询
微信咨询